
Uвых = 5 В (10 кОм/(10 кОм+ 10 кОм))= 2,5 В.
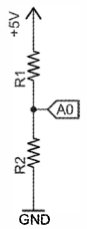
Рис. 3.9. Простой делитель напряжения

Рис. 3.10. Фоторезистор
Теперь предположим, что один из этих резисторов переменный, например фоторезистор (рис. 3.1 0). Сопротивление фоторезистора зависит от интенсивности падающего на него света. Я использовал фоторезистор с номинальным сопротивлением 200 кОм. В полной темноте его сопротивление около 200 кОм, при ярком свете оно падает почти до нуля. От того, какой резистор (R1 или R2) поменять на фоторезистор, и от номинала постоянного резистора будет зависеть масштаб и точность показаний. Попробуйте поэкспериментировать с различными конфигурациями и посмотрите через монитор последовательного порта, как меняются показания.
В качестве примера заменим R1 на фоторезистор, а R2 возьмем постоянным с номиналом 10 кОм (рис. 3.11 ). Для данного упражнения можно оставить на плате RGB-светодиод и подключить его как одноцветный.
Загрузите программу считывания аналоговых данных и выдачи результата в последовательный порт ( см. листинг 3.1) и поменяйте освещенность фоторезистора. Вы не сможете получить весь диапазон значений от 0 до 1023, потому что у фоторезистора никогда не будет нулевого сопротивления. В результате вы определите минимальное и максимальное значения напряжения на выходе. Эти данные потребуются, чтобы сделать "интеллектуальный" ночник, который будет светить более ярко в темном помещении, и наоборот. Выберите аналоговые значения для вашей комнаты, соответствующие темноте и максимальной освещенности. У меня это бы
- 77 -
ли значения 200 (темнота) и 900 (максимальное освещение). У вас могут быть другие цифры. Они зависят от условий освещения, значения резистора R2 и характеристик фоторезистора.

Рис. 3.11. Подключение фоторезистора
Напомним, что функция analogWrite() позволяет изменять яркость светодиода. Но не забывайте, аргумент этой функции 8-разрядный, т. е. находится в диапазоне от 0 до 255, в то время как АЦП выдает значения от 0 до 1023. В языке программирова
- 78 -
ния Arduino есть удобные функции для пропорционального преобразования значений от одного диапазона к другому: map() и constrain(). Синтаксис функции map() выглядит следующим образом:
output = map(value, fromLow, fromHigh, toLow, toHigh).
Здесь value - преобразуемое значение (напряжение на аналоговом входе). fromLow и fromHigh - это нижняя и верхняя границы текущего диапазона. В нашем примере это минимальная и максимальная освещенность в помещении (200 и 900). toLow и toHigh - нижняя и верхняя границы нового диапазона. Аргумент функции analogWrite() должен быть в диапазоне от 0 до 255. Но мы хотим меньшей освещенности сопоставить большую яркость светодиода, т. е. минимальным значениям на аналоговом входе должны соответствовать максимальные значения на выводах светодиода. У доб но, что функция map() делает это автоматически. Функция map() осуществляет линейное отображение. Например, если fromLow и fromHigh равны 200 и 900, соответственно, а toLow и toHigh равны 255 и 0, то 550 превратится в 127, потому что 550 находится посередине между 200 и 900, а 127 посередине между 255 и 0. Следует учесть, что функция map() не ограничивает значения, если они выходят за границы диапазона. Если value окажется меньше 200 (для нашего примера), то output будет больше 255. Это неудобно, т. к. передать функции analogWrite() значение, превышающее 255, нельзя. Для ограничения значений есть Функция constrain(), синтаксис которой выглядит следующим образом:
output = constrain(value, min, max).
При передаче значения из функции map() в функцию constrain() можно установить аргумент min равным 0 и max - 255, тогда величины, выходящие за рамки этого диапазона, будут ограничены. Теперь все готово, чтобы написать программу управляемого ночника. Посмотрим, как будет выглядеть окончательно наш проект (листинг 3.3).
Листинг 3.3. Программа управляемого ночника - nightlight.ino
// Автоматический ночник
const int RLED=9; // Контакт 9 для ШИМ-вывода RED RGB-светодиода
const int LIGHT=0; // Контакт A0 для входа фоторезистора
const int MIN_LIGHT=200; // Нижний порог освещенности
const int MAX_LIGHT=900; // Верхний порог освещенности
int val = 0; // Переменная для сохранения считанного аналогового значения
void setup()
{
pinMode(RLED, OUTPUT); // Сконфигурировать RED-контакт светодиода как выход
}
- 79 -
void loop()
{
val = analogRead(LIGHT); // Чтение показаний фоторезистора
val = map(val, MIN_LIGHT, MAX_LIGHT, 255, 0); // вызов функции map()
val = constrain(val, 0, 255); // ограничение границ
analogWrite(RLED, val); // управление светодиодом
}
Обратите внимание, что в листинге переменная val используется повторно.
В принципе, можно задать и другую переменную. В таких функциях, как map(), предыдущее значение переменной val служит в качестве аргумента и после завершения выполнения функции перезаписывается заново.
Загрузите программу в плату Arduino и посмотрите, работает ли ночник, как ожидалось. Чувствительность ночника можно отрегулировать, подобрав минимальную и максимальную границы комфортного диапазона с помощью монитора последовательного порта. Подумайте, как можно реализовать в этой программе выбор цвета ночника, воспользовавшись сведениями из предыдущей главы. Попробуйте добавить кнопку для выбора цвета светодиода и фоторезистор для регулировки яркости каждого цвета.
Резюме
• Чем отличаются аналоговые сигналы от цифровых.
• Как преобразовать аналоговые сигналы в цифровые.
• Как считать аналоговый сигнал с потенциометра.
• Как вывести на экран данные, используя монитор последовательного порта.
• Как взаимодействовать через интерфейс с аналоговыми датчиками.
• Как создать собственные аналоговые датчики.
• Как ограничить значения для управления аналоговыми выходами.
Список деталей
Для повторения примеров главы вам понадобятся следующие детали:
• плата Arduino Uno;
• USB-кабель;
• батарея 9 В;
• разъем для батареи 9 В;
• стабилизатор напряжения L4940V5;
• электролитический конденсатор 22 мкФ;
• электролитический конденсатор 0, 1 мкФ;
• керамический конденсатор 1 мкФ;
• 4 синих светодиода;
• 4 резистора номиналом 1 кОм;
• биполярный n-p-n транзистор PN2222;
• диод 1N4004;
• перемычки;
• провода;
• ИК-датчик расстояния Sharp GP2YOA41SKOF ИК с кабелем;
• стандартный серводвигатель;
• двигатель постоянного тока;
• макетная плата;
• потенциометр;
• драйвер двигателя SN754410.
- 84 -
На странице http://www.exploringarduino.com/content/ch4 можно загрузить код программ, видеоуроки и другие материалы для данной главы. Кроме того, листинги примеров можно скачать со страницы www.wiley.com/go/exploringarduino в разделе Downloads.
Теперь вы уже можете получать информацию из окружающей среды. Но как управлять этим миром? Мигание светодиода и автоматическая регулировка яркости ночника уже неплохо, но вы можете сделать гораздо больше. Двигатели и приводы, а также транзисторы позволят осуществлять с помощью Arduino реальные физические действия. Соединяя двигатели с платой Arduino, можно управлять роботами, создавать механические манипуляторы, перемещать датчики и делать многое другое. В этой главе вы узнаете, как запускать двигатели постоянного тока, как работать с транзисторами и управлять серводвигателями. Освоив это, вы сможете создать датчик расстояния, способный определять расположение близлежащих объектов. Этот датчик идеально подходит, например, для установки на автономном движущемся роботе. По завершении главы вы приобретете навыки, достаточные для разработки по-настоящему интерактивного устройства.
ПРИМЕЧАНИЕ
Если вы хотите узнать больше о двигателях и транзисторах, смотрите видеофильм, расположенный на интернет-странице
http://www.jeremyblum.com/2011/01/31/arduino-tutorial-5-motors-and-transistors/[8]
ВНИМАНИЕ!
Для питания двигателей постоянного тока потребуется батарея 9 В, т. к. для работы электродвигателя требуется больше мощности, чем может выдать плата Arduino. Это напряжение не опасно, но при неправильном подключении можно повредить электронные компоненты. При повторении примеров тщательно проверяйте схемы и следуйте инструкциям. Избегайте коротких замыканий, не пытайтесь соединить два источника напряжения друг с другом. Следите за тем, чтобы источники напряжения 5 и 9 В не оказались подключены к одной шине питания макетной платы.
Вал двигателя постоянного тока вращается при подаче постоянного напряжения на его контакты. Подобные двигатели можно встретить во многих бытовых приборах, например, в радиоуправляемых автомобилях, в приводе DVD-плеера. Такие двигатели бывают разного размера и обычно стоят недорого. Регулируя напряжение, подаваемое на двигатель, можно менять скорость его вращения. Переключая полярность приложенного напряжения, можно изменять направление вращения. Это делают, используя Н-мост, о котором вы узнаете далее в этой главе.
- 85 -
Щеточные двигатели постоянного тока состоят из неподвижных магнитов ( статора) и вращающейся обмотки (ротора). Электроэнергию подводят через контакты "щетки", поэтому двигатели называются щеточными. В отличие от электродвигателей постоянного тока других типов (таких, например, как шаговые двигатели), щеточные электродвигатели дешевле и скорость вращения легко регулировать. Однако их срок службы невелик, потому что щетки со временем изнашиваются.
